全ページの添付ファイル一覧
[
トップ
] [
新規
|
一覧
|
検索
|
最終更新
|
ヘルプ
|
ログイン
]
2種類の顕微鏡画像によるレジストレーション手法
2値化レーザー1.JPG
[
詳細
]
2値化レーザー2.JPG
[
詳細
]
テンプレート1一致.JPG
[
詳細
]
テンプレート2一致.JPG
[
詳細
]
テンプレート2結果.JPG
[
詳細
]
テンプレート3一致.JPG
[
詳細
]
テンプレート3結果.JPG
[
詳細
]
テンプレート4一致.JPG
[
詳細
]
テンプレート4結果.JPG
[
詳細
]
テンプレート画像1.JPG
[
詳細
]
一致箇所2.JPG
[
詳細
]
一致箇所3.JPG
[
詳細
]
一致箇所4.JPG
[
詳細
]
共焦点レーザー顕微鏡画像(全).JPG
[
詳細
]
共焦点レーザー顕微鏡画像.JPG
[
詳細
]
重ね合わせ図.JPG
[
詳細
]
電1-共1.JPG
[
詳細
]
電子顕微鏡画像.JPG
[
詳細
]
電子顕微鏡画像2.JPG
[
詳細
]
電子顕微鏡画像2一致.JPG
[
詳細
]
電子顕微鏡画像3.JPG
[
詳細
]
電子顕微鏡画像3一致.JPG
[
詳細
]
電子顕微鏡画像4.JPG
[
詳細
]
電子顕微鏡画像4一致.jpg
[
詳細
]
電子顕微鏡画像1.JPG
[
詳細
]
3D-LiDARを用いた人物追従システムの開発
camera.png
[
詳細
]
cameradist.png
[
詳細
]
closs1.jpg
[
詳細
]
closs2.jpg
[
詳細
]
closs3.jpg
[
詳細
]
clustaconclusion.png
[
詳細
]
distpick.png
[
詳細
]
distrect.png
[
詳細
]
following1.jpg
[
詳細
]
following2.jpg
[
詳細
]
following3.jpg
[
詳細
]
imgcoodinate.png
[
詳細
]
refcamera.jpg
[
詳細
]
refimg.png
[
詳細
]
robotcoodinate.png
[
詳細
]
wall1.jpg
[
詳細
]
wall2.jpg
[
詳細
]
wall3.jpg
[
詳細
]
CGにおける最適光源位置選択のための照明条件の評価法
121.png
[
詳細
]
12B_graph.png
[
詳細
]
12G_graph.png
[
詳細
]
12_h(0).png
[
詳細
]
12_h(1).png
[
詳細
]
12_h(16).png
[
詳細
]
12_h(2).png
[
詳細
]
12_h(32).png
[
詳細
]
12_h(8).png
[
詳細
]
13B_graph.png
[
詳細
]
13G_graph.png
[
詳細
]
13_h(0).png
[
詳細
]
13_h(1).png
[
詳細
]
13_h(16).png
[
詳細
]
13_h(2).png
[
詳細
]
13_h(32).png
[
詳細
]
13_h(8).png
[
詳細
]
195.png
[
詳細
]
42.png
[
詳細
]
buddha(0).png
[
詳細
]
buddha(1).png
[
詳細
]
buddha(2).png
[
詳細
]
bunny(0).png
[
詳細
]
bunny(1).png
[
詳細
]
bunny(2).png
[
詳細
]
bunny12.png
[
詳細
]
bunny13.png
[
詳細
]
dragon(0).png
[
詳細
]
dragon(1).png
[
詳細
]
dragon(2).png
[
詳細
]
entropy.png
[
詳細
]
gradation_sample.png
[
詳細
]
histgram.png
[
詳細
]
image.png
[
詳細
]
teapot(3D).png
[
詳細
]
teapot13.png
[
詳細
]
yajirusi.png
[
詳細
]
FrontPage
cyanfilterresult.jpg
[
詳細
]
HOG特徴と色特徴を用いたつくばチャレンジにおけるロボット走行可能領域推定手法の提案
C1.png
[
詳細
]
G1.png
[
詳細
]
H1.png
[
詳細
]
K1.png
[
詳細
]
K2.png
[
詳細
]
K3.png
[
詳細
]
K4.png
[
詳細
]
L1.png
[
詳細
]
L2.png
[
詳細
]
M1.png
[
詳細
]
M2.png
[
詳細
]
P1.png
[
詳細
]
P2.png
[
詳細
]
R1.png
[
詳細
]
T1.png
[
詳細
]
a.png
a.png (backup No.1)
[
詳細
]
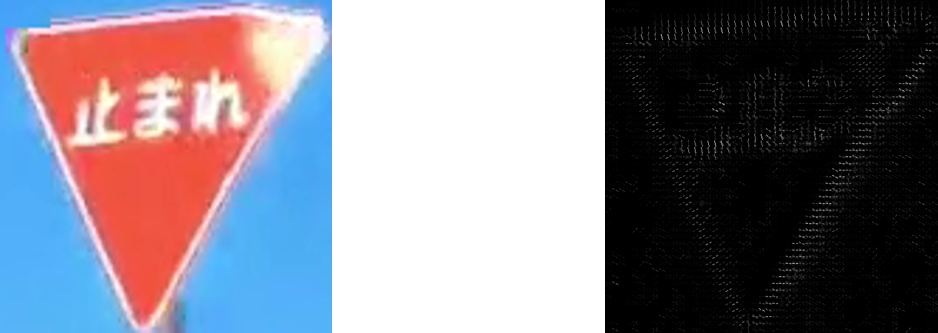
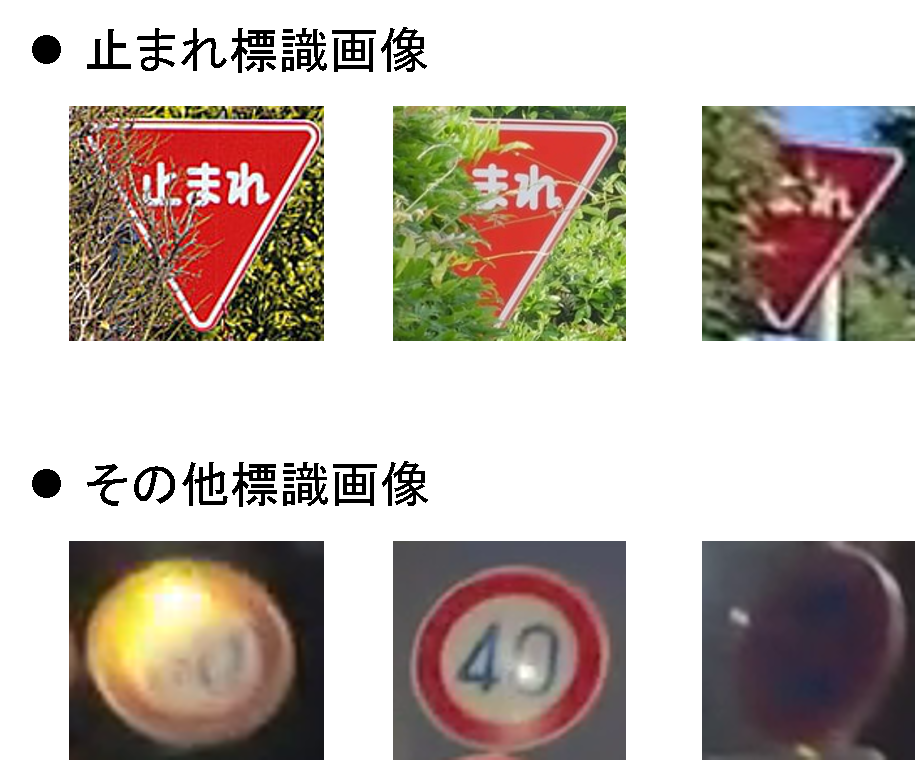
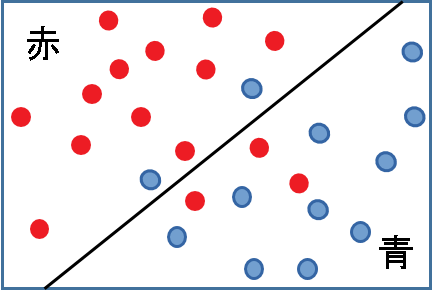
HOG特徴を用いたSVMによる止まれ標識判定
HOG_calculation.png
[
詳細
]
big_c.png
[
詳細
]
big_gamma.png
[
詳細
]
f_calculation.png
[
詳細
]
f_calculation.png (backup No.1)
[
詳細
]
fn_1.png
[
詳細
]
fn_2.png
[
詳細
]
fp_1.png
[
詳細
]
fp_2.png
[
詳細
]
fp_3.png
[
詳細
]
fp_4.png
[
詳細
]
hog_feature_img_1.png
[
詳細
]
hog_feature_img_1.png (backup No.1)
[
詳細
]
hog_feature_img_1.png (backup No.2)
[
詳細
]
hog_feature_img_2.png
[
詳細
]
hog_feature_img_2.png (backup No.1)
[
詳細
]
precious_calculation.png
[
詳細
]
result.png
[
詳細
]
set_sign_img.png
[
詳細
]
set_sign_img.png (backup No.1)
[
詳細
]
small_c.png
[
詳細
]
small_gamma.png
[
詳細
]
stop_sign_1.png
stop_sign_1.png (backup No.1)
[
詳細
]
stop_sign_2.png
stop_sign_2.png (backup No.1)
[
詳細
]
stop_sign_3.png
stop_sign_3.png (backup No.1)
[
詳細
]
stop_sign_4.png
stop_sign_4.png (backup No.1)
[
詳細
]
stop_sign_5.png
stop_sign_5.png (backup No.1)
[
詳細
]
stop_sign_6.png
stop_sign_6.png (backup No.1)
[
詳細
]
stop_sign_img_1.png
stop_sign_img_1.png (backup No.1)
[
詳細
]
svm.png
[
詳細
]
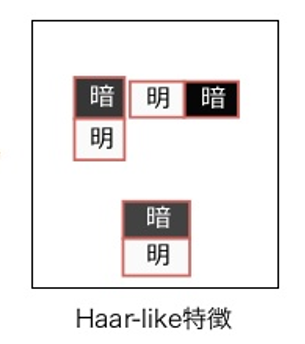
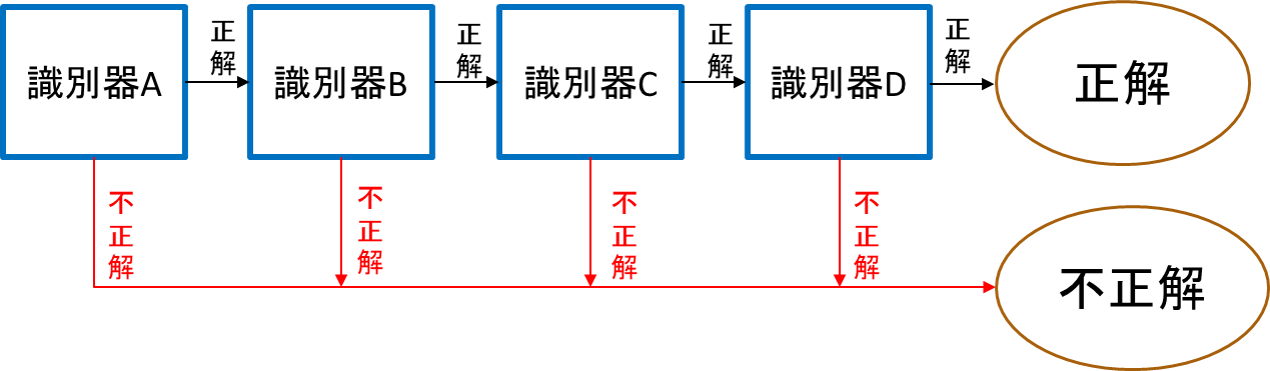
Haar-like特徴量を用いたカスケード分類器による前方車両の識別
G003000007.jpg
[
詳細
]
G003000049.jpg
[
詳細
]
G105000636.jpg
[
詳細
]
G306000375.jpg
[
詳細
]
Haar-like.png
[
詳細
]
Haar-like2.png
[
詳細
]
cascade.png
[
詳細
]
memo2.jpg
[
詳細
]
nsam1.PNG
[
詳細
]
nsam3.PNG
[
詳細
]
nsam6.PNG
[
詳細
]
psam1.PNG
[
詳細
]
psam2.PNG
[
詳細
]
psam6.PNG
[
詳細
]
Hough変換を利用した車線の検出
im1.png
[
詳細
]
im2.png
[
詳細
]
im3.png
[
詳細
]
im4.png
[
詳細
]
im5.png
[
詳細
]
im6.png
[
詳細
]
ICPマッチングを使用した高精度点群地図生成手法の開発
abs_point.png
[
詳細
]
composition.png
[
詳細
]
conversion.png
[
詳細
]
conversion_2.png
[
詳細
]
cordinate.png
[
詳細
]
flow.png
[
詳細
]
global_map_white.png
[
詳細
]
icp_cp.png
[
詳細
]
icp_path.jpg
[
詳細
]
icp_start.png
[
詳細
]
lidar.jpg
[
詳細
]
locater.png
[
詳細
]
map_build_icp.png
[
詳細
]
map_build_pyramid_icp.png
[
詳細
]
mercury_brue.jpg
[
詳細
]
mini_map_cp.png
[
詳細
]
new_global_map.png
[
詳細
]
new_global_map.png (backup No.1)
[
詳細
]
old_global_map.png
[
詳細
]
old_global_map.png (backup No.1)
[
詳細
]
opencv_cord.png
[
詳細
]
overlay.png
[
詳細
]
point_cloud.png
[
詳細
]
point_cloud_trm.png
[
詳細
]
pyramid_2.png
[
詳細
]
robot_cord.png
[
詳細
]
scan-icp_cp.png
[
詳細
]
scan-icp_path.jpg
[
詳細
]
scan-icp_start.png
[
詳細
]
scan_cp.png
[
詳細
]
scan_path.jpg
[
詳細
]
scan_start.png
[
詳細
]
true_pose.png
[
詳細
]
tsukuba_1.png
[
詳細
]
tsukuba_2.png
[
詳細
]
tsukuba_3.png
[
詳細
]
LBP特徴量を用いたつくばチャレンジにおける経路封鎖看板の判定
LBP.jpg
[
詳細
]
course-map.png
[
詳細
]
gray.jpg
[
詳細
]
基準画像.png
[
詳細
]
失敗例1.png
[
詳細
]
失敗例2.png
[
詳細
]
失敗例3.png
[
詳細
]
SIFT特徴量を用いた照明変化に堅牢な画像照合に関する研究
00122.png
[
詳細
]
00125.png
[
詳細
]
1442_key.png
[
詳細
]
1723_key.png
[
詳細
]
bovw_zengo.png
[
詳細
]
cloud_bovw.png
[
詳細
]
cloud_hom.png
[
詳細
]
cloud_miss.png
[
詳細
]
haregazougun.png
[
詳細
]
hom_gyoretu.png
[
詳細
]
hom_gyoretu2.png
[
詳細
]
hom_pitta.png
[
詳細
]
hom_zengo.png
[
詳細
]
kumorigazougun.png
[
詳細
]
no_ransac_matching.png
[
詳細
]
ransac_matching.png
[
詳細
]
sunny_bovw.png
[
詳細
]
sunny_hom.png
[
詳細
]
Snakes法による右心室短軸像輪郭検出
hyou1.jpg
[
詳細
]
hyou2.jpg
[
詳細
]
hyou3.jpg
[
詳細
]
init.jpg
[
詳細
]
mrisample.jpg
[
詳細
]
snakes_sample.jpg
[
詳細
]
sobelkai.png
[
詳細
]
ta1i_18e.jpg
[
詳細
]
ta1i_3e.jpg
[
詳細
]
ta1i_8e.jpg
[
詳細
]
ta1s_18e.jpg
[
詳細
]
ta1s_3e.jpg
[
詳細
]
ta1s_8e.jpg
[
詳細
]
tan1_18e.jpg
[
詳細
]
tan1_3e.jpg
[
詳細
]
tan1_8e.jpg
[
詳細
]
tanjiku1.jpg
[
詳細
]
tanjiku2.jpg
[
詳細
]
tanjiku3.jpg
[
詳細
]
つくばチャレンジにおける3D-LiDARを用いた経路封鎖看板の検出手法
000306.png
[
詳細
]
000350.png
[
詳細
]
000845.png
[
詳細
]
000851.png
[
詳細
]
002214.png
[
詳細
]
002218.png
[
詳細
]
002365.png
[
詳細
]
clustering.png
[
詳細
]
corse.png
[
詳細
]
dist.png
[
詳細
]
dist2365.png
[
詳細
]
dist_002365.png
[
詳細
]
lidar.jpg
[
詳細
]
make_pair.png
[
詳細
]
pandora_front_color_000306.jpg
[
詳細
]
pandora_front_color_000845.jpg
[
詳細
]
pandora_front_color_002218.jpg
[
詳細
]
pandora_front_color_002365.jpg
[
詳細
]
processing_pc.png
[
詳細
]
reflect.png
[
詳細
]
road-closed_5m.jpg
[
詳細
]
signboard.jpg
[
詳細
]
つくばチャレンジにおけるLiDARの点群データを用いた特定物体検出手法の開発
2342re.png
[
詳細
]
2629.png
[
詳細
]
2863.png
[
詳細
]
29r.png
[
詳細
]
623.png
[
詳細
]
932.png
[
詳細
]
c32.png
[
詳細
]
camera1_000030(1).png
[
詳細
]
camera1_000316.png
[
詳細
]
camera1_000623.png
[
詳細
]
camera1_000932.png
[
詳細
]
camera1_001914.png
[
詳細
]
camera1_002342.png
[
詳細
]
camera1_002628.png
[
詳細
]
camera1_002863(1).png
[
詳細
]
camera1_004140.png
[
詳細
]
center_cone.jpg
[
詳細
]
cone.png
[
詳細
]
corse.png
[
詳細
]
course.png
[
詳細
]
dist.png
[
詳細
]
ditect_cone.png
[
詳細
]
ditect_sign.png
[
詳細
]
edge.png
[
詳細
]
line_cone.png
[
詳細
]
mercury.jpg
[
詳細
]
park-map.png
[
詳細
]
road-closed_5m.jpg
[
詳細
]
sample_cone.png
[
詳細
]
sample_sign.png
[
詳細
]
signboard.jpg
[
詳細
]
つくばチャレンジにおけるカメラを用いた経路封鎖看板の検出
000049.png
[
詳細
]
Mercury.jpg
[
詳細
]
course.png
[
詳細
]
cut_white_rect.png
[
詳細
]
dst_ellipse.png
[
詳細
]
one_sinboard.png
[
詳細
]
park.png
[
詳細
]
white_rect0.png
[
詳細
]
white_rect1.png
[
詳細
]
white_rect2.png
[
詳細
]
white_rect3.png
[
詳細
]
つくばチャレンジに向けた移動ロボットの自律走行システムの開発
auto_system.png
[
詳細
]
checkpoint.png
[
詳細
]
ext_poten.png
[
詳細
]
mercury.jpg
[
詳細
]
obst_line.png
[
詳細
]
poten_func.png
[
詳細
]
pyramid_image1.png
[
詳細
]
pyramid_image2.png
[
詳細
]
pyramid_image3.png
[
詳細
]
task_course.png
[
詳細
]
true_obst.png
[
詳細
]
tsukuba_map.png
[
詳細
]
つくばチャレンジに向けた自律走行ロボットの経路計画手法の開発
binary.png
[
詳細
]
eq.png
[
詳細
]
line.png
[
詳細
]
mercury.png
[
詳細
]
pic.png
[
詳細
]
potential.png
[
詳細
]
rawsurface.png
[
詳細
]
sof.png
[
詳細
]
surface.png
[
詳細
]
travelable.png
[
詳細
]
つくばチャレンジに向けた色情報とHOG特徴を用いた歩行者用信号認識手法の開発
course_map.png
[
詳細
]
dis_histo.png
[
詳細
]
evaluation.png
[
詳細
]
extract.png
[
詳細
]
failed_sample.png
[
詳細
]
hog_failed.png
[
詳細
]
hog_formula.png
[
詳細
]
hog_histogram.png
[
詳細
]
hog_process.png
[
詳細
]
hue_failed.png
[
詳細
]
hue_histogram.png
[
詳細
]
kernel.png
[
詳細
]
labeling.png
[
詳細
]
learning_data.png
[
詳細
]
new_svm_judge.png
[
詳細
]
not_detect.png
[
詳細
]
not_signal.png
[
詳細
]
svm.png
[
詳細
]
tukuba_signal.png
[
詳細
]
つくばチャレンジに向けた色相ヒストグラムを用いた歩行者用信号認識手法の提案
aftermedian.png
[
詳細
]
beforemedian.png
[
詳細
]
datan.jpg
[
詳細
]
histblue.png
[
詳細
]
histred.png
[
詳細
]
histreds.png
[
詳細
]
labeling.jpg
[
詳細
]
map.png
[
詳細
]
nresult.png
[
詳細
]
nsignal.jpg
[
詳細
]
rgbcolor.png
[
詳細
]
つくばチャレンジのためのTCP通信を用いた位置情報モニタリングシステムの開発
1.png
[
詳細
]
10.png
[
詳細
]
11.png
[
詳細
]
12.png
[
詳細
]
13.png
[
詳細
]
14.png
[
詳細
]
15.png
[
詳細
]
16.png
[
詳細
]
17.png
[
詳細
]
18.png
[
詳細
]
2.png
[
詳細
]
3.png
[
詳細
]
4.png
[
詳細
]
5.png
[
詳細
]
6.png
[
詳細
]
7.png
[
詳細
]
8.png
[
詳細
]
9.png
[
詳細
]
campus_map.png
[
詳細
]
constitusion.png
[
詳細
]
constitusion2.png
[
詳細
]
course.png
[
詳細
]
green.png
[
詳細
]
mercury.jpg
[
詳細
]
net.png
[
詳細
]
port.png
[
詳細
]
portforward.png
[
詳細
]
red.png
[
詳細
]
robot_server.png
[
詳細
]
route.png
[
詳細
]
つくばチャレンジのための信号認識手法の研究
Hsv.png
[
詳細
]
algorithm.png
[
詳細
]
answer.png
[
詳細
]
binary.png
[
詳細
]
blue-error.png
[
詳細
]
blue-result.png
[
詳細
]
error1.png
[
詳細
]
error2.png
[
詳細
]
map.png
[
詳細
]
red-error.png
[
詳細
]
red-result.png
[
詳細
]
signal1.png
[
詳細
]
signal2.png
[
詳細
]
signal3.png
[
詳細
]
signal4.png
[
詳細
]
つくばチャレンジのための実機調整に適したウェイポイント作成ツールの開発
appearance.png
[
詳細
]
dsc.png
[
詳細
]
kinbou.png
[
詳細
]
many_maypoints.png
[
詳細
]
math1.png
[
詳細
]
math2.png
[
詳細
]
obs.png
[
詳細
]
param_show.png
[
詳細
]
part_map.png
[
詳細
]
selecrtmulti.png
[
詳細
]
selectone.png
[
詳細
]
semai.png
[
詳細
]
tool_image.png
[
詳細
]
travelable.png
[
詳細
]
waypoint_adl.png
[
詳細
]
waypoint_line.png
[
詳細
]
zoom1.png
[
詳細
]
zoom2.png
[
詳細
]
zoom3.png
[
詳細
]
zoom4.png
[
詳細
]
つくばチャレンジのための形状情報と色情報を用いた人物検出手法
compare.png
[
詳細
]
dis1.jpg
[
詳細
]
dis2.jpg
[
詳細
]
dis3.jpg
[
詳細
]
dis4.jpg
[
詳細
]
dis5.jpg
[
詳細
]
formula1.png
[
詳細
]
formula2.png
[
詳細
]
formula3.png
[
詳細
]
formula4.png
[
詳細
]
graph.png
[
詳細
]
group.jpg
[
詳細
]
human.png
[
詳細
]
map.png
[
詳細
]
omni.jpg
[
詳細
]
omnis.jpg
[
詳細
]
outputs.jpg
[
詳細
]
p3at.png
[
詳細
]
patches.png
[
詳細
]
つくばチャレンジのための色情報と形状情報を用いた人物検出手法
bin.png
[
詳細
]
board_cog.png
[
詳細
]
campus_human.png
[
詳細
]
color_mask.png
[
詳細
]
color_patch.png
[
詳細
]
color_range.png
[
詳細
]
detection_area.png
[
詳細
]
fig14.png
[
詳細
]
fig16.png
[
詳細
]
fig17.png
[
詳細
]
fig19.png
[
詳細
]
flowchart.png
[
詳細
]
human.png
[
詳細
]
input.png
[
詳細
]
lrf_in.png
[
詳細
]
lrf_input_c.png
[
詳細
]
lrf_out.png
[
詳細
]
lrf_output_c.png
[
詳細
]
omni.png
[
詳細
]
outdoor_mask_c.png
[
詳細
]
robot.png
[
詳細
]
target.png
[
詳細
]
tsukuba_map.png
[
詳細
]
x_lrf_c.png
[
詳細
]
x_lrf_l.png
[
詳細
]
x_lrf_r.png
[
詳細
]
エッジ画像によるテンプレートマッチングを用いた歩行者用信号認識手法
Sobel.png
[
詳細
]
data-set.png
[
詳細
]
detect-edge.png
[
詳細
]
edge-match.png
[
詳細
]
failed-detect.png
[
詳細
]
gray-match.png
[
詳細
]
hsv-threshold.png
[
詳細
]
not-detect.png
[
詳細
]
result.png
[
詳細
]
score.png
[
詳細
]
sobel.png
[
詳細
]
succes-cloud.png
[
詳細
]
succes-rain.png
[
詳細
]
succes-sunny.png
[
詳細
]
tempmatch.png
[
詳細
]
tukuba-corse.png
[
詳細
]
エッジ画像を用いた照明変化に堅牢なテンプレートマッチング
21.jpg
[
詳細
]
gazo4shu.jpg
[
詳細
]
kak.jpg
[
詳細
]
lena3.jpg
[
詳細
]
lenamewiki.jpg
[
詳細
]
temps.png
[
詳細
]
tree.jpg
[
詳細
]
エピポーラ拘束を用いた小惑星画像の対応点決定における精度向上手法
akazeE_e5_000005.jpeg
[
詳細
]
akazeE_e5_135140.jpeg
[
詳細
]
akazeE_e5_265270.jpeg
[
詳細
]
akaze_000005.jpeg
[
詳細
]
akaze_135140.jpeg
[
詳細
]
akaze_265270.jpeg
[
詳細
]
ansgraph05.png
[
詳細
]
ansgraph135140.png
[
詳細
]
ansgraph265270.png
[
詳細
]
ave.png
[
詳細
]
epimat.jpeg
[
詳細
]
episiki.jpeg
[
詳細
]
epi図.png
[
詳細
]
image000_005.png
[
詳細
]
image135_140.png
[
詳細
]
image265_270.png
[
詳細
]
param05.png
[
詳細
]
param135140.png
[
詳細
]
param265270.png
[
詳細
]
小惑星像000005.png
[
詳細
]
正答率.png
[
詳細
]
コンピュータグラフィクスにおける最適視点位置の自動計算
Thesis_bunny.eps
[
詳細
]
bunny_max_entropy.jpeg
[
詳細
]
bunny_min_entropy.jpeg
[
詳細
]
question_result.jpg
[
詳細
]
thesis_bunny.jpeg
[
詳細
]
thesis_bunny.png
[
詳細
]
thesis_bunny1.png
[
詳細
]
アンケートexample.png
[
詳細
]
矢印.png
[
詳細
]
シーンマッチングによる自動運転ナビゲーション
HOG.jpg
[
詳細
]
LBP.jpg
[
詳細
]
LBP2.jpg
[
詳細
]
TemplateMatching.jpeg
[
詳細
]
accuracy.jpeg
[
詳細
]
canny.png
[
詳細
]
canny2.png
[
詳細
]
dst_HOG.png
[
詳細
]
dst_HOG2.png
[
詳細
]
dst_LBP.png
[
詳細
]
dst_LBP2.png
[
詳細
]
peak_Canny.png
[
詳細
]
rad.jpeg
[
詳細
]
reCanny.png
[
詳細
]
route.jpg
[
詳細
]
view1.jpg
[
詳細
]
view2.jpg
[
詳細
]
zncc.jpeg
[
詳細
]
シーン照合のための照明変化に対して堅牢な画像照合方法
NCC-1.png
[
詳細
]
NCC-2.png
[
詳細
]
S5.png
[
詳細
]
S5分布-Ehog.jpg
[
詳細
]
S5分布-Es.jpg
[
詳細
]
S5分布-Eth.jpg
[
詳細
]
テンプレート全体画像.jpg
[
詳細
]
テンプレート抽出例2.png
[
詳細
]
使用テンプレート画像例.jpg
[
詳細
]
散布図Ehog3.jpg
[
詳細
]
散布図Es3.jpg
[
詳細
]
散布図Eth3.jpg
[
詳細
]
画像群1夜.jpg
[
詳細
]
画像群1昼.jpg
[
詳細
]
画像群1雨.jpg
[
詳細
]
画像群2-1.JPG
[
詳細
]
画像群2-2.JPG
[
詳細
]
画像群2-3.JPG
[
詳細
]
相関係数.png
[
詳細
]
自律走行ロボット.jpg
[
詳細
]
類似度分布例4.jpg
[
詳細
]
ステレオ画像処理による障害物検出の高速化手法の提案
depth.jpg
[
詳細
]
depth_QVGA.jpg
[
詳細
]
depth_QVGA_2.jpg
[
詳細
]
ex0.jpg
[
詳細
]
ex1.jpg
[
詳細
]
ex2.jpg
[
詳細
]
ex3.jpg
[
詳細
]
ex4.jpg
[
詳細
]
ex5.jpg
[
詳細
]
f_detect.jpg
[
詳細
]
f_reduce.jpg
[
詳細
]
matching.jpg
[
詳細
]
スポーツ選手の運動解析を目的とした背景差分とラべリングによる移動体追跡
area.jpg
[
詳細
]
diff.jpg
[
詳細
]
direction.jpg
[
詳細
]
dis.jpg
[
詳細
]
fllow.jpg
[
詳細
]
rabel.jpg
[
詳細
]
result4_half.png
[
詳細
]
sample.png
[
詳細
]
sportsit03.jpg
[
詳細
]
テスト
test.png
test.png (backup No.1)
[
詳細
]
テンプレートマッチングによる歩行者信号機の検出
gonin.png
[
詳細
]
hsv-th.png
[
詳細
]
label.png
[
詳細
]
miken.png
[
詳細
]
nyuryoku.png
[
詳細
]
result.png
[
詳細
]
succes-cloud.png
[
詳細
]
succes-rain.png
[
詳細
]
succes-sun.png
[
詳細
]
teian.png
[
詳細
]
tyusyutu.png
[
詳細
]
zncc.png
[
詳細
]
テンプレートマッチング手法の天候・照明変化に対するロバスト性の評価
graph09.jpg
[
詳細
]
graph10.jpg
[
詳細
]
graph11.jpg
[
詳細
]
graph12.jpg
[
詳細
]
graph13.jpg
[
詳細
]
im2011_06_09_12_13_12_0.jpg
[
詳細
]
jikken1.jpg
[
詳細
]
jikken1_09.jpg
[
詳細
]
jikken1_10.jpg
[
詳細
]
jikken1_11.jpg
[
詳細
]
jikken1_12.jpg
[
詳細
]
jikken1_13.jpg
[
詳細
]
jikken1_2.jpg
[
詳細
]
jikken1_total.jpg
[
詳細
]
jikken2.jpg
[
詳細
]
light_and_rain.jpg
[
詳細
]
preparation.jpg
[
詳細
]
robot.jpg
[
詳細
]
temp_and_fog.jpg
[
詳細
]
template.jpg
[
詳細
]
テンプレートマッチング法のパターンの変形に対する耐性の実験的評価
backgroundImages.jpg
[
詳細
]
exp-all.jpg
[
詳細
]
exp-background.jpg
[
詳細
]
exp-template.jpg
[
詳細
]
result-expansion-cs.jpg
[
詳細
]
result-expansion-ti.jpg
[
詳細
]
result-reduction-cs.jpg
[
詳細
]
result-reduction-ti.jpg
[
詳細
]
result-rotate-cs.jpg
[
詳細
]
result-rotate-ti.jpg
[
詳細
]
result-trapezoid-cs.jpg
[
詳細
]
result-trapezoid-ti.jpg
[
詳細
]
rotate.jpg
[
詳細
]
scale.jpg
[
詳細
]
templateImages-cs.jpg
[
詳細
]
templateImages-ti.jpg
[
詳細
]
templateMatching.jpg
[
詳細
]
threshold-and-evalValue.jpg
[
詳細
]
trapezoid.jpg
[
詳細
]
テンプレートマッチング法のパターンの変形に対する耐性の評価
チャート.jpg
[
詳細
]
テンプレートマッチング.jpg
[
詳細
]
倍率.jpg
[
詳細
]
倍率0-0.jpg
[
詳細
]
倍率0-2.jpg
[
詳細
]
倍率0-32.jpg
[
詳細
]
倍率0-8.jpg
[
詳細
]
判定値.jpg
[
詳細
]
回転.jpg
[
詳細
]
回転0-0.jpg
[
詳細
]
回転0-2.jpg
[
詳細
]
回転0-32.jpg
[
詳細
]
回転0-8.jpg
[
詳細
]
実験画像1.jpg
[
詳細
]
実験画像2.jpg
[
詳細
]
ドット・格子を用いた色覚異常者のための画像変換手法
11.png
[
詳細
]
1en.png
[
詳細
]
25ex.jpg
[
詳細
]
49zentai.png
[
詳細
]
CB.png
[
詳細
]
CBH.png
[
詳細
]
CBcb.png
[
詳細
]
CBha.png
[
詳細
]
circle_hatch.jpg
[
詳細
]
count.png
[
詳細
]
dokuobi.png
[
詳細
]
dot_lec.jpg
[
詳細
]
ex4.jpg
[
詳細
]
ex9.jpg
[
詳細
]
example_k1.jpg
[
詳細
]
hyou.png
[
詳細
]
hyou2.png
[
詳細
]
kousi_ex.jpg
[
詳細
]
kousi_lec.png
[
詳細
]
obi.png
[
詳細
]
obicb.png
[
詳細
]
obidk.png
[
詳細
]
obidkcb.png
[
詳細
]
obiha.png
[
詳細
]
obihacb.png
[
詳細
]
obiori.png
[
詳細
]
rosen_ex.jpg
[
詳細
]
ハッチングを用いた色覚異常者のための画像変換手法
example1.jpg
[
詳細
]
example_k1.jpg
[
詳細
]
example_k2.jpg
[
詳細
]
example_k3.jpg
[
詳細
]
gradation.jpg
[
詳細
]
label1.jpg
[
詳細
]
label2.jpg
[
詳細
]
mask.jpg
[
詳細
]
ロボットのナビゲーションのための照明変化に堅牢な画像マッチング手法の研究
SeqSLAM_mat.png
[
詳細
]
SeqSLAM_pitch.png
[
詳細
]
SeqSLAM_sea.png
[
詳細
]
ocm.png
[
詳細
]
光学フィルターを用いた色覚異常者の視認補助手法の研究
cyanfilterresult.jpg
[
詳細
]
ishihara7-12.jpg
[
詳細
]
ishihara7.jpg
[
詳細
]
magentafilterresult.jpg
[
詳細
]
nofilterresult.jpg
[
詳細
]
proposal.jpg
[
詳細
]
redgreensample.jpg
[
詳細
]
result.jpg
[
詳細
]
光通信を用いた理科教材の開発
フォト.jpg
[
詳細
]
受光回路.jpg
[
詳細
]
受光部.jpg
[
詳細
]
太陽.jpg
[
詳細
]
概略図.png
[
詳細
]
発光A.jpg
[
詳細
]
発光B.jpg
[
詳細
]
発光回路.jpg
[
詳細
]
発光部.jpg
[
詳細
]
単眼画像からの深度マップを用いた障害物検出手法の提案
brightreduce.jpg
[
詳細
]
depth.jpg
[
詳細
]
depth.png
depth.png (backup No.1)
[
詳細
]
depth_ori.png
depth_ori.png (backup No.1)
[
詳細
]
duplication.png
[
詳細
]
edge_bright.jpg
[
詳細
]
feature.png
[
詳細
]
feature_ori.png
[
詳細
]
featureless.jpg
[
詳細
]
flow.png
[
詳細
]
input.jpg
[
詳細
]
neighber.png
[
詳細
]
obj_recog_gen.png
[
詳細
]
obj_recog_gen.png (backup No.1)
[
詳細
]
obj_recog_spe.png
[
詳細
]
obj_recog_spe.png (backup No.1)
[
詳細
]
obst.png
[
詳細
]
shadow.jpg
[
詳細
]
stereo.png
[
詳細
]
success.jpg
[
詳細
]
tunnel.png
[
詳細
]
wl_miss.jpg
[
詳細
]
wl_remove.png
[
詳細
]
wl_result.png
[
詳細
]
参照画素選択によるテンプレートマッチングの 道路標識への適用
091.png
[
詳細
]
detected.jpeg
[
詳細
]
histogram.png
[
詳細
]
key_result.png
[
詳細
]
key_result_shift.png
[
詳細
]
kyouki.png
[
詳細
]
misdetection.jpeg
[
詳細
]
red.png
[
詳細
]
resultgraph.png
[
詳細
]
template50_3.png
[
詳細
]
zncc.png
[
詳細
]
天候・照明変化に対して堅牢な画像照合方法の評価
0609.png
[
詳細
]
0610.png
[
詳細
]
0610_12_00.jpg
[
詳細
]
0611.png
[
詳細
]
0612.png
[
詳細
]
0613.png
[
詳細
]
navigation_example.jpg
[
詳細
]
save_ISC.jpg
[
詳細
]
save_NCC.jpg
[
詳細
]
save_SRF.jpg
[
詳細
]
save_SSD.jpg
[
詳細
]
template-matching.jpg
[
詳細
]
template1.jpg
[
詳細
]
total.png
[
詳細
]
分割テンプレート.jpg
[
詳細
]
路面.jpg
[
詳細
]
太田研 公開用Wiki
1.5m.png
[
詳細
]
1m.png
[
詳細
]
1式.png
[
詳細
]
2.5m.png
[
詳細
]
2m.png
[
詳細
]
2式.png
[
詳細
]
3.5m.png
[
詳細
]
3m.png
[
詳細
]
4m.png
[
詳細
]
Stereo_Triangulation.png
[
詳細
]
aftermedian.png
[
詳細
]
beforemedian.png
[
詳細
]
clip_image028.jpg
[
詳細
]
cordinate.png
cordinate.png (backup No.1)
[
詳細
]
extract.png
extract.png (backup No.1)
[
詳細
]
labelingimg.png
[
詳細
]
result.png
[
詳細
]
result_difference.png
[
詳細
]
wikiafterlabeling.jpg
[
詳細
]
定点観測画像を用いた風景照合手法の照明変化に対する堅牢性評価
1式.png
[
詳細
]
2式.png
[
詳細
]
Fixed_point_image.png
[
詳細
]
Sdave.png
[
詳細
]
Sdave2.png
[
詳細
]
Sdstdev.png
[
詳細
]
Sdstdev2.png
[
詳細
]
fixed_point_image2.png
[
詳細
]
matching_graph1.png
[
詳細
]
tmp.png
[
詳細
]
ヒストグラム1.png
[
詳細
]
ヒストグラム2.png
[
詳細
]
全テンプレート平均.png
[
詳細
]
定点観測画像1分割.png
[
詳細
]
定点観測画像2分割.png
[
詳細
]
定点観測画像分割.png
[
詳細
]
考察1.png
[
詳細
]
考察2.png
[
詳細
]
考察3.png
[
詳細
]
考察4.png
[
詳細
]
考察5.png
[
詳細
]
誤認識1.png
[
詳細
]
誤認識2.png
[
詳細
]
小惑星画像からの形状復元手法に適した特徴点検出手法
correctimage000_thick3_min.png
[
詳細
]
correctset1.png
[
詳細
]
correctset2.png
[
詳細
]
evimgs.png
[
詳細
]
image000.png
[
詳細
]
image_example.png
[
詳細
]
matchimage_set000.png
[
詳細
]
matchimage_set120.png
[
詳細
]
matchimage_set240.png
[
詳細
]
samples.png
[
詳細
]
shuseibun3and5.png
[
詳細
]
sift_set1.png
[
詳細
]
teach_correct.png
[
詳細
]
value.png
[
詳細
]
表1.png
[
詳細
]
表2.png
[
詳細
]
小惑星画像の対応点決定を目的としたSIFTとAKAZEの性能比較
AKAZEKeyPoint.png
[
詳細
]
MATCHKeyPoint.png
[
詳細
]
SIFTKeyPoint.png
[
詳細
]
exper2_1.png
[
詳細
]
exper2_2.png
[
詳細
]
exper2_3.png
[
詳細
]
experiment.png
[
詳細
]
sift000_005_100.png
[
詳細
]
差分画像によるテンプレートマッチングを用いた歩行者用信号機の状態変化の検出手法
FN1_1.jpg
[
詳細
]
FN1_2.jpg
[
詳細
]
FN1_re.jpg
[
詳細
]
FN2_1.jpg
[
詳細
]
FN2_2.jpg
[
詳細
]
FN2_re.jpg
[
詳細
]
FNex1.jpg
[
詳細
]
FP_ot1.jpg
[
詳細
]
FP_ot2.jpg
[
詳細
]
FPex1.jpg
[
詳細
]
ROC.png
[
詳細
]
TFex1.jpg
[
詳細
]
TPex1.jpg
[
詳細
]
ci.jpg
ci.jpg (backup No.1)
[
詳細
]
corse.png
[
詳細
]
cutim.jpg
cutim.jpg (backup No.1)
[
詳細
]
cutimg.jpg
[
詳細
]
d1.png
[
詳細
]
d2.png
[
詳細
]
d2.png (backup No.1)
[
詳細
]
d3.png
[
詳細
]
f.png
[
詳細
]
img.jpg
[
詳細
]
ol.png
[
詳細
]
ol_.7.jpg
[
詳細
]
ol_.8.jpg
[
詳細
]
sdp.png
[
詳細
]
sgc.png
[
詳細
]
t1.png
[
詳細
]
t2.png
[
詳細
]
形状及び色特徴を用いた安全運転支援システムのための信号機検出処理
answer.jpg
[
詳細
]
answer2.jpg
[
詳細
]
circle.jpg
[
詳細
]
go.jpg
[
詳細
]
in.jpg
[
詳細
]
lena-rf.jpg
[
詳細
]
mi.jpg
[
詳細
]
nichika.jpg
[
詳細
]
result.jpg
[
詳細
]
result2.jpg
[
詳細
]
rf.jpg
[
詳細
]
rf2.jpg
[
詳細
]
表.jpg
[
詳細
]
形状情報を利用した歩行者用信号認識
mercury_tukuba.png
[
詳細
]
miss.png
[
詳細
]
miss_.png
[
詳細
]
notdetected.png
[
詳細
]
range.png
[
詳細
]
signal0.png
[
詳細
]
signal03.png
[
詳細
]
signal3.png
[
詳細
]
table_hsv.png
[
詳細
]
table_result.png
[
詳細
]
tamplate_signal.png
[
詳細
]
template_signal.png
[
詳細
]
zncc.png
[
詳細
]
有吉修論(編集中)
algorithm_of_Learning.pdf
[
詳細
]
algorithm_of_classifying.pdf
[
詳細
]
calculation_of_HoHue.pdf
[
詳細
]
signboard.png
[
詳細
]
混同色線上の位置を画素のブリンク情報にマップした色覚異常者用画像処理
(1).jpg
[
詳細
]
(2).jpg
[
詳細
]
missblink.jpg
[
詳細
]
resultbeef.jpg
[
詳細
]
resulttomato.jpg
[
詳細
]
tomatoyakiniku.jpg
[
詳細
]
tomatoyakinikuxy.jpg
[
詳細
]
u.jpg
[
詳細
]
xy.png
[
詳細
]
xyP.jpg
[
詳細
]
xyPCon.jpg
[
詳細
]
混同色線上の位置情報を画素のブリンク情報にマップした色覚異常者用の画像処理
Strength.png
[
詳細
]
beef.png
[
詳細
]
ex1.png
[
詳細
]
hyou.png
[
詳細
]
ichi.png
[
詳細
]
syuhou1.png
[
詳細
]
syuhou2.png
[
詳細
]
tomato.png
[
詳細
]
tomatobeef.png
[
詳細
]
tomatobeef2.png
[
詳細
]
xy.png
[
詳細
]
xyP.jpg
[
詳細
]
xyPCon.jpg
[
詳細
]
画像によるロボットのナビゲーションのための照明変化に堅牢な画像マッチング手法
EqH_a.png
[
詳細
]
EqH_b.png
[
詳細
]
Ex0_I.png
[
詳細
]
Ex0_T.png
[
詳細
]
Ex0_rst.png
[
詳細
]
Ex0i_S.png
[
詳細
]
Ex0t_S.png
[
詳細
]
Ex1_r.png
[
詳細
]
Ex2-1_D.png
[
詳細
]
Ex2-1_l.png
[
詳細
]
Ex2-1_s.png
[
詳細
]
Ex2-2_D.png
[
詳細
]
Ex2-2_I.png
[
詳細
]
Ex2-2_T.png
[
詳細
]
Ex2-2_l.png
[
詳細
]
Ex2-2_s.png
[
詳細
]
Ex2_1_I.png
[
詳細
]
Ex2_1_T.png
[
詳細
]
Ex2_add.png
[
詳細
]
Ex3_1I.png
[
詳細
]
Ex3_1IMG.png
[
詳細
]
Ex3_g.png
[
詳細
]
Ex4_im.png
[
詳細
]
Ex4_r.png
[
詳細
]
Seq_m.png
[
詳細
]
Seq_p.png
[
詳細
]
Seq_s.png
[
詳細
]
mil_c.png
[
詳細
]
ocm.png
[
詳細
]
ocm_c.png
[
詳細
]
znc_c.png
[
詳細
]
画像による親指の微小変位を利用した非接触インターフェースの開発
circuit.png
[
詳細
]
detection_range.png
[
詳細
]
optical_flow.png
[
詳細
]
result.png
[
詳細
]
system.png
[
詳細
]
system_image.JPEG
[
詳細
]
thumb_move.png
[
詳細
]
wave.png
[
詳細
]
画像による遠方の物体を利用した自律走行ロボットの方向補正手法の研究
ABM.png
[
詳細
]
jikkenkekka.png
[
詳細
]
kekka_0.jpg
[
詳細
]
kousatu_1.png
[
詳細
]
kousatu_2.png
[
詳細
]
omomi.png
[
詳細
]
sayu_heiko.jpg
[
詳細
]
画像処理によりミニチュア風景を作成する手法の研究
after.jpg
[
詳細
]
grad.png
[
詳細
]
jiken.jpg
[
詳細
]
mini_ABC.png
[
詳細
]
smallplanet3.jpg
[
詳細
]
画像処理を用いた実験動物の運動機能計測手法
camera.jpg
[
詳細
]
excelrei.jpg
[
詳細
]
kekka1.png
[
詳細
]
kekka2.png
[
詳細
]
kekka3.png
[
詳細
]
kekka4.png
[
詳細
]
kekka5.png
[
詳細
]
samp.jpg
[
詳細
]
sura1.png
[
詳細
]
sura2.png
[
詳細
]
sura3.png
[
詳細
]
画像特徴量とサポートベクターマシンを用いた歩行者用信号機の検出手法の提案
Negative.png
[
詳細
]
Positive.png
[
詳細
]
acc.png
[
詳細
]
c_e_image.jpg
[
詳細
]
course.png
[
詳細
]
green.jpg
[
詳細
]
green01.jpg
[
詳細
]
green02.jpg
[
詳細
]
hh_g.png
[
詳細
]
hh_r.png
[
詳細
]
hlbp_g.png
[
詳細
]
hlbp_r.png
[
詳細
]
hlbph_g.png
[
詳細
]
hlbph_r.png
[
詳細
]
hog.png
[
詳細
]
hog.png (backup No.1)
[
詳細
]
hog_g.png
[
詳細
]
hog_r.png
[
詳細
]
hogh_g.png
[
詳細
]
hogh_r.png
[
詳細
]
input_image.jpg
[
詳細
]
l_image.jpg
[
詳細
]
l_image.jpg (backup No.1)
[
詳細
]
labeling_image.jpg
labeling_image.jpg (backup No.1)
[
詳細
]
lbp.png
[
詳細
]
lbp_calc.png
[
詳細
]
my_cv_method.png
[
詳細
]
parameter_c.png
[
詳細
]
parameter_g.png
[
詳細
]
parameter_gamma.png
[
詳細
]
red.png
[
詳細
]
red01.jpg
[
詳細
]
red02.jpg
[
詳細
]
signal.png
[
詳細
]
画像群による3Dプリンタ用のモデル形成手法
input_imgs.png
[
詳細
]
model_texture.png
[
詳細
]
output.png
[
詳細
]
text3035-0.png
[
詳細
]
確率的Hough変換を用いた横断歩道又は自転車横断帯ありの検出
anglepairs2.jpg
[
詳細
]
移動ロボットのためのステレオカメラを用いた障害物検出の性能向上手法
NCC.png
[
詳細
]
calibrate1.png
[
詳細
]
calibrate2.png
[
詳細
]
calibrate3.png
[
詳細
]
calibrate4.png
[
詳細
]
conve_edge_l.png
[
詳細
]
conve_edge_r.png
[
詳細
]
conve_obst_l.png
[
詳細
]
conve_obst_r.png
[
詳細
]
obst_l_X.png
[
詳細
]
obst_l_noX.png
[
詳細
]
obst_r_X.png
[
詳細
]
obst_r_noX.png
[
詳細
]
pinhole.png
[
詳細
]
sanjigen.png
[
詳細
]
sanjigen2.png
[
詳細
]
teian.png
[
詳細
]
移動ロボットのための位置情報モニタリングシステムの開発
Coordinate.jpg
[
詳細
]
MainWindow.jpg
[
詳細
]
allmap.jpg
[
詳細
]
jikkenrute1.jpg
[
詳細
]
jikkenrute2.jpg
[
詳細
]
kirinuki.jpg
[
詳細
]
kirinuki2.jpg
[
詳細
]
map_campus3.png
[
詳細
]
minimap.jpg
[
詳細
]
result1.jpg
[
詳細
]
result2.jpg
[
詳細
]
robot.png
[
詳細
]
siki1.png
[
詳細
]
siki2.png
[
詳細
]
siki3.png
[
詳細
]
stop.jpg
[
詳細
]
tsukuba.png
[
詳細
]
背景差分画像の重心を用いたマーモセットの手指運動測定
gazou01.png
[
詳細
]
gazou02.png
[
詳細
]
gazou03.png
[
詳細
]
gazou04.png
[
詳細
]
gazou05.png
[
詳細
]
自動運転車両のための道路白線検出
001.png
[
詳細
]
002.png
[
詳細
]
003.png
[
詳細
]
004.png
[
詳細
]
005.png
[
詳細
]
006.png
[
詳細
]
007.png
[
詳細
]
008.png
[
詳細
]
009.png
[
詳細
]
自律走行ロボットのためのハフ変換を用いた進行方向算出
data1.JPG
[
詳細
]
data10.JPG
[
詳細
]
data2.JPG
[
詳細
]
data3.JPG
[
詳細
]
data4.JPG
[
詳細
]
data5.JPG
[
詳細
]
data6.JPG
[
詳細
]
data7.JPG
[
詳細
]
data8.JPG
[
詳細
]
data9.JPG
[
詳細
]
pic1.JPG
[
詳細
]
pic2.JPG
[
詳細
]
pic3.JPG
[
詳細
]
pic4.JPG
[
詳細
]
pic5.JPG
[
詳細
]
自律走行ロボットのための撮影位置の変化に堅牢な画像照合手法
abm2.png
[
詳細
]
fig02-1.png
[
詳細
]
fig03.png
[
詳細
]
issue.png
[
詳細
]
result-2.png
[
詳細
]
result.png
[
詳細
]
robot.png
[
詳細
]
speedup1.png
[
詳細
]
自律走行ロボットのための深層学習による物体認識
BB.png
[
詳細
]
compare_to_spec_a.png
[
詳細
]
kekka.png
[
詳細
]
labelimg.png
[
詳細
]
tsukuba_NP_TF.jpg
[
詳細
]
tsukuba_TP_NF.jpg
[
詳細
]
tsukuba_TP_TF.jpg
[
詳細
]
tsukuba_a0001.jpg
[
詳細
]
tsukuba_b0001.jpg
[
詳細
]
tsukuba_cource.png
[
詳細
]
tsukuba_d0001.jpg
[
詳細
]
tsukuba_f0001.jpg
[
詳細
]
tsukuba_g0001.jpg
[
詳細
]
自律走行ロボットの行動制御プログラムの作成
MG09.jpg
[
詳細
]
Module.jpg
[
詳細
]
自律走行ロボットの道なり走行のための消失点検出手法の精度向上
9area.png
[
詳細
]
9seg04.png
[
詳細
]
9seg05.png
9seg05.png (backup No.1)
[
詳細
]
9seg06.png
9seg06.png (backup No.1)
[
詳細
]
9seg07.png
9seg07.png (backup No.1)
[
詳細
]
LSD.png
LSD.png (backup No.1)
[
詳細
]
canny.png
[
詳細
]
duplication.png
[
詳細
]
extension.png
[
詳細
]
houghp.png
houghp.png (backup No.1)
[
詳細
]
ip.png
[
詳細
]
kukaku.png
[
詳細
]
lsd_displacement.png
[
詳細
]
lsd_displacement.png (backup No.1)
[
詳細
]
outotu.png
outotu.png (backup No.1)
[
詳細
]
outotu_not.png
outotu_not.png (backup No.1)
[
詳細
]
result01.png
[
詳細
]
result02.png
[
詳細
]
seg.png
[
詳細
]
seg_displacement.png
[
詳細
]
shade.png
[
詳細
]
vp01.png
[
詳細
]
自律走行ロボットの道なり走行のための消失点検出方法
bg.jpg
[
詳細
]
kouten.png
[
詳細
]
result000000_0_bl.jpg
[
詳細
]
result000000_0_c.jpg
[
詳細
]
result000000_0_g.jpg
[
詳細
]
result000000_0_l.jpg
[
詳細
]
result000000_0_v.jpg
[
詳細
]
result000000_0_x.jpg
[
詳細
]
result000001_0_v.jpg
[
詳細
]
result000002_0_v.jpg
[
詳細
]
result000050_0_v.jpg
[
詳細
]
result000051_0_v.jpg
[
詳細
]
result000052_0_v.jpg
[
詳細
]
色ヒストグラムとSVMを用いた特定服装人物検出手法の提案
bluesample.png
[
詳細
]
comparison_extension.png
[
詳細
]
exposure.png
[
詳細
]
exposure_change.png
[
詳細
]
human_sample.png
[
詳細
]
input_binarization.png
[
詳細
]
labeling.png
[
詳細
]
log_human.png
[
詳細
]
map.jpg
[
詳細
]
negativesample.png
[
詳細
]
orangesample.png
[
詳細
]
result.png
[
詳細
]
result_comparison.png
[
詳細
]
robot.png
[
詳細
]
sat_graph.png
[
詳細
]
square.png
[
詳細
]
verify_color.png
[
詳細
]
verify_lidar.png
[
詳細
]
色ヒストグラムの重み付けを利用した信号認識手法の提案
carrrrrrr.png
[
詳細
]
error.png
[
詳細
]
hist_blue2.png
[
詳細
]
hist_red2.png
[
詳細
]
median.png
[
詳細
]
robot2.png
[
詳細
]
weighting.png
[
詳細
]
色情報とテンプレートマッチングを用いた道路標識の検出
data.png
[
詳細
]
data2.png
[
詳細
]
data_example.png
[
詳細
]
data_success.png
[
詳細
]
detection_flowchart.jpg
[
詳細
]
dst_image.png
[
詳細
]
image.png
[
詳細
]
image_before.png
[
詳細
]
labeling_after.jpg
[
詳細
]
labeling_after.jpg (backup No.1)
[
詳細
]
labeling_after.png
labeling_after.png (backup No.1)
[
詳細
]
labeling_before.jpg
[
詳細
]
labeling_before.jpg (backup No.1)
[
詳細
]
labeling_before.png
labeling_before.png (backup No.1)
[
詳細
]
result2_0.png
[
詳細
]
result_0.png
[
詳細
]
result_fault1.png
[
詳細
]
result_fault2.bmp
result_fault2.bmp (backup No.1)
[
詳細
]
result_fault2.png
[
詳細
]
result_fault3.bmp
result_fault3.bmp (backup No.1)
[
詳細
]
result_fault3.png
[
詳細
]
result_fault4.png
[
詳細
]
result_fault5.png
[
詳細
]
template.png
[
詳細
]
色情報と大津の閾値判別法を用いたエッジ検出
compare1.jpg
[
詳細
]
compare2.jpg
[
詳細
]
compare3.jpg
[
詳細
]
edge.jpg
[
詳細
]
kadai.jpg
[
詳細
]
ketten.jpg
[
詳細
]
step1.jpg
[
詳細
]
step2.jpg
[
詳細
]
step3.jpg
[
詳細
]
step4.jpg
[
詳細
]
teian1.jpg
[
詳細
]
teian2.jpg
[
詳細
]
色情報と形状情報を用いた道路標識の自動検出
bin.png
[
詳細
]
consideration_242.png
[
詳細
]
consideration_298.png
[
詳細
]
consideration_301.png
[
詳細
]
equation1.png
[
詳細
]
equation2.png
[
詳細
]
equation3.png
[
詳細
]
input.png
[
詳細
]
input_ex1.png
[
詳細
]
input_ex2.png
[
詳細
]
label_closing.png
[
詳細
]
label_closing.png (backup No.1)
[
詳細
]
label_param.png
[
詳細
]
label_piece.png
[
詳細
]
label_piece.png (backup No.1)
[
詳細
]
label_piece_tri.png
[
詳細
]
label_piece_tri.png (backup No.1)
[
詳細
]
min_enclosing_triangle.png
[
詳細
]
min_enclosing_triangle.png (backup No.1)
[
詳細
]
noise_reject.png
[
詳細
]
red.png
[
詳細
]
result267.png
[
詳細
]
result295.png
[
詳細
]
temp_circ.png
[
詳細
]
temp_stop.png
[
詳細
]
色情報と形状特徴を用いた道路交通標識の認識手法の提案
3.jpg
[
詳細
]
Parro.jpg
[
詳細
]
akaao.jpg
[
詳細
]
al.jpg
[
詳細
]
ed.jpg
[
詳細
]
ed2.jpg
[
詳細
]
iro.jpg
[
詳細
]
iro2.jpg
[
詳細
]
match.jpg
[
詳細
]
nnp.jpg
[
詳細
]
np.jpg
[
詳細
]
np2.jpg
[
詳細
]
np3.jpg
[
詳細
]
np4.jpg
[
詳細
]
pps.jpg
[
詳細
]
ps.jpg
[
詳細
]
ps2.jpg
[
詳細
]
ps3.jpg
[
詳細
]
s.jpg
[
詳細
]
shiki.jpg
[
詳細
]
shiki2.jpg
[
詳細
]
shiki3.jpg
[
詳細
]
shiki4.jpg
[
詳細
]
sst.jpg
[
詳細
]
st.jpg
[
詳細
]
st2.jpg
[
詳細
]
st3.jpg
[
詳細
]
色情報による駐車禁止標識の検出
hyou3.2.png
[
詳細
]
jouken1.png
[
詳細
]
jouken2.png
[
詳細
]
siki1.png
[
詳細
]
siki2.png
[
詳細
]
siki3.png
[
詳細
]
zu1.png
[
詳細
]
zu2.1.png
[
詳細
]
zu2.2.4.png
[
詳細
]
zu2.2].png
[
詳細
]
zu2.3.png
[
詳細
]
zu2.4.1.png
[
詳細
]
zu2.4.2.png
[
詳細
]
zu2.4.3.1.png
[
詳細
]
zu2.4.3.2.png
[
詳細
]
zu2.4.3.png
[
詳細
]
zu2.4.4.png
[
詳細
]
zu2.4.png
[
詳細
]
zu3.2.png
[
詳細
]
zu4.1.png
[
詳細
]
zu4.2.png
[
詳細
]
色情報を用いた道路標識の自動抽出
1.png
[
詳細
]
2.png
[
詳細
]
Flow_img.png
[
詳細
]
case1.png
[
詳細
]
case2.png
[
詳細
]
case3.png
[
詳細
]
case4.png
[
詳細
]
closing_img1.png
[
詳細
]
closing_img2.png
[
詳細
]
noise_img1.png
[
詳細
]
noise_img2.png
[
詳細
]
red_img.png
[
詳細
]
result.png
[
詳細
]
temp.png
[
詳細
]
temp_img.png
[
詳細
]
色抽出とテンプレートマッチングを用いた複数種類の道路標識の自動検出
algorithm.eps
algorithm.eps (backup No.1)
[
詳細
]
algorithm.png
[
詳細
]
bgr_img.png
[
詳細
]
bin.png
bin.png (backup No.1)
[
詳細
]
bin_img.png
[
詳細
]
color.png
color.png (backup No.1)
[
詳細
]
denoised.png
denoised.png (backup No.1)
[
詳細
]
denoised_img.png
[
詳細
]
discuss1_color.png
[
詳細
]
discuss1_denoised.png
[
詳細
]
discuss1_red.png
[
詳細
]
discuss2_bin.png
[
詳細
]
discuss2_color.png
[
詳細
]
discuss2_denoised.png
[
詳細
]
ex_false.png
[
詳細
]
ex_true.png
[
詳細
]
false1.png
[
詳細
]
false2.png
[
詳細
]
formula.png
[
詳細
]
label_param.png
[
詳細
]
red.png
red.png (backup No.1)
[
詳細
]
red_img.png
[
詳細
]
temp_circ.png
[
詳細
]
temp_stop.png
[
詳細
]
true1.png
[
詳細
]
true2.png
[
詳細
]
色抽出と形状特徴を利用した止まれの標識の検出
zu2.1.jpg
[
詳細
]
zu2.2.jpg
[
詳細
]
zu2.3.jpg
[
詳細
]
zu2.4.jpg
[
詳細
]
zu2.5.jpg
[
詳細
]
zu2.6.jpg
[
詳細
]
zu2.7.jpg
[
詳細
]
zu2.8.jpg
[
詳細
]
zu3.1.jpg
[
詳細
]
zu4.1.jpg
[
詳細
]
zu4.2.jpg
[
詳細
]
zu4.3.jpg
[
詳細
]
zu4.4.jpg
[
詳細
]
zu5.1.jpg
[
詳細
]
色特徴とHOG特徴を用いたつくばチャレンジにおける経路封鎖サインの検出
0-1.png
[
詳細
]
a_sign.png
[
詳細
]
graph.png
[
詳細
]
map.png
[
詳細
]
result1.PNG
[
詳細
]
result2.PNG
[
詳細
]
result3.PNG
[
詳細
]
result4.PNG
[
詳細
]
sign.png
[
詳細
]
siki1.png
[
詳細
]
siki2.png
[
詳細
]
siki3.png
[
詳細
]
svm_soft.png
[
詳細
]
色特徴とHOG特徴を用いた特定サインの検出
0-1.png
[
詳細
]
a_sign.png
[
詳細
]
graph.png
[
詳細
]
map.png
[
詳細
]
result1.PNG
[
詳細
]
result2.PNG
[
詳細
]
result3.PNG
[
詳細
]
result4.PNG
[
詳細
]
result4.PNG (backup No.1)
[
詳細
]
sign.png
[
詳細
]
siki1.png
[
詳細
]
siki1.png (backup No.1)
[
詳細
]
siki2.png
[
詳細
]
siki3.png
[
詳細
]
svm_soft.png
[
詳細
]
色覚異常者のための色の境界検出手法
A.png
[
詳細
]
B.png
[
詳細
]
Cx.png
[
詳細
]
Cy.png
[
詳細
]
M.png
[
詳細
]
P.png
[
詳細
]
XYZ.png
[
詳細
]
fx.png
[
詳細
]
ganma.png
[
詳細
]
v1v2.png
[
詳細
]
v1v2v3.png
[
詳細
]
v3.png
[
詳細
]
図1.png
[
詳細
]
図10.png
[
詳細
]
図11.png
[
詳細
]
図2.png
[
詳細
]
図3.png
[
詳細
]
図4.png
[
詳細
]
図5.png
[
詳細
]
図6.png
[
詳細
]
図7.png
[
詳細
]
図8.png
[
詳細
]
図9.png
[
詳細
]
複比を用いた横断歩道パターンの認識
1.PNG
[
詳細
]
2.PNG
[
詳細
]
3.PNG
[
詳細
]
DR450.jpg
[
詳細
]
DR600.jpg
[
詳細
]
Result350.jpg
[
詳細
]
aG.jpg
[
詳細
]
aLDL.jpg
[
詳細
]
bG.jpg
[
詳細
]
cross_ratio.png
[
詳細
]
cross_ratio1.png
[
詳細
]
eG.jpg
[
詳細
]
路面パターンと画像直線を用いた自律移動ロボットにおける自己位置推定
FindRef_000582749.JPG
[
詳細
]
FindRef_003188280.JPG
[
詳細
]
Houghl3_000871640.JPG
[
詳細
]
PB1579974.JPG
[
詳細
]
g000582749.JPG
[
詳細
]
g000871640.JPG
[
詳細
]
g000887484.JPG
[
詳細
]
g003188280.JPG
[
詳細
]
g_univ_route3.JPG
[
詳細
]
hough_rslt.JPG
[
詳細
]
ref2003188280.JPG
[
詳細
]
道路レーンの画像による白線検出処理
douro1.jpg
[
詳細
]
douro2.jpg
[
詳細
]
douro3.jpg
[
詳細
]
douro4.jpg
[
詳細
]
douro5.jpg
[
詳細
]
douro6.jpg
[
詳細
]
douro7.jpg
[
詳細
]
douro8.jpg
[
詳細
]
douro9.jpg
[
詳細
]
防犯カメラで撮影された低解像度のナンバープレートの数字識別
effect.png
[
詳細
]
exResult.png
[
詳細
]
ex_ideal2.png
[
詳細
]
ex_idealResult.png
[
詳細
]
jikkenM1.jpg
[
詳細
]
method.jpg
[
詳細
]
method2.jpg
[
詳細
]
numberReal.jpg
[
詳細
]
referencePlate_real.jpg
[
詳細
]
stageFig.jpg
[
詳細
]
防犯カメラを用いた 低解像度ナンバープレートの数字識別
b1123_.jpg
[
詳細
]
d-1123_.jpg
[
詳細
]
d1123_.jpg
[
詳細
]
method.jpg
[
詳細
]
reference2.jpg
[
詳細
]
referencePlate.jpg
[
詳細
]
refrenceimage.jpg
[
詳細
]
result.jpg
[
詳細
]
result2.jpg
[
詳細
]
処理方法.jpg
[
詳細
]
顔の表情変化の有無の検出
0.jpg
[
詳細
]
case1.JPG
[
詳細
]
case2(瞬き).JPG
[
詳細
]
case2.JPG
[
詳細
]
case3.JPG
[
詳細
]
r0.jpg
[
詳細
]
フローチャート.JPG
[
詳細
]
フローチャート.bmp
[
詳細
]
判別の流れ.JPG
[
詳細
]
失敗.JPG
[
詳細
]
平行移動の図.JPG
[
詳細
]
結果1.JPG
[
詳細
]
結果2.JPG
[
詳細
]
表情変化の図.JPG
[
詳細
]
表情変化の図.bmp
[
詳細
]
![[PukiWiki]](image/pukiwiki.png "[PukiWiki]")
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![zu2.2].png](index.php?plugin=attach&pcmd=open&file=zu2.2%5D.png&refer=%E8%89%B2%E6%83%85%E5%A0%B1%E3%81%AB%E3%82%88%E3%82%8B%E9%A7%90%E8%BB%8A%E7%A6%81%E6%AD%A2%E6%A8%99%E8%AD%98%E3%81%AE%E6%A4%9C%E5%87%BA){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}